Mục lục:
Cảm biến điện áp nhảy
Cấu tạo: Cảm biến oxy gồm có một thân bằng gốm, chẳng hạn như zirconi dioxide. Mặt trong và ngoài của nó được phủ bằng một lớp vi xốp mỏng bằng platin.
Cảm biến được gia nhiệt để có thể nhanh chóng đạt được nhiệt độ hoạt động. Mặt ngoài của cảm biến được đặt trực tiếp trong dòng khí thải và được nối liền với vỏ bọc qua lớp phủ platin và tạo thành cực âm (-). Mặt trong của cảm biến tiếp xúc trực tiếp với áp suất khí quyển, được nối liền với một đầu nối dẫn ra bên ngoài qua lớp phủ platin và tạo thành cực dương (+).
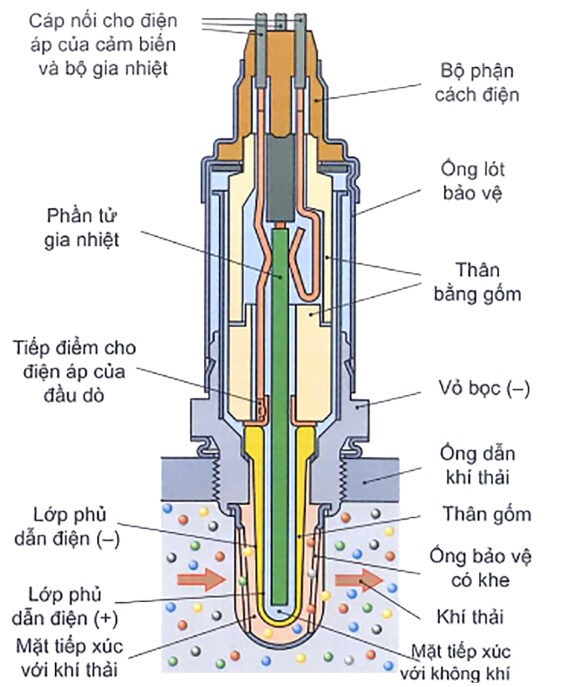
Nguyên lý hoạt động: Vật liệu gốm của cảm biến oxy có khả năng dẫn điện cho những ion oxy ở nhiệt độ trên 300 °C. Sự khác biệt giữa lượng oxy ở mặt tiếp xúc với không khí và lượng oxy dư ở mặt tiếp xúc với khí thải của đầu dò tạo ra sự nhảy điện áp trong khoảng 100 mV (hòa khí nhạt) đến 800 mV (hòa khí đậm) khi λ ≈ 1. Nếu λ = 1 thì điện áp trong khoảng 450 mV đến 500 mV. Nhiệt độ cao nhất của đầu dò không nên vượt quá khoảng 850 °C đến 900 °C.
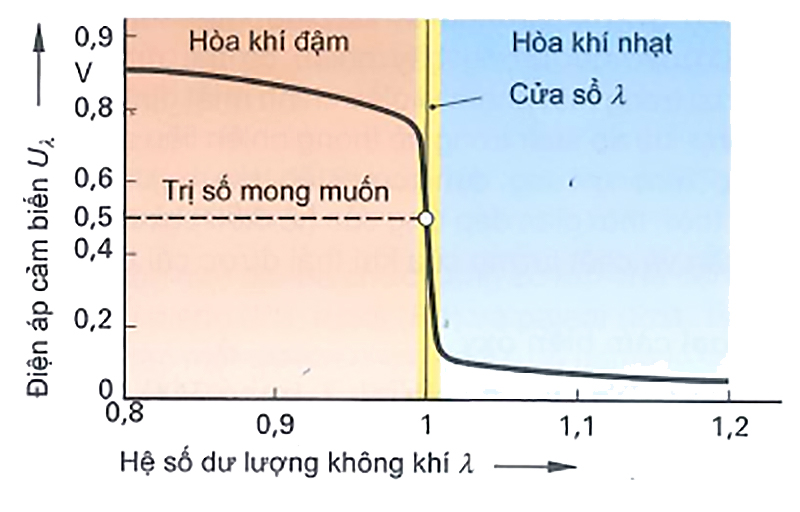
Tần số điều chỉnh: Khi tốc độ quay không tải của động cơ được nâng cao (~ 2.000 vòng/phút) thì tần số điều chỉnh của một cảm biến hoạt động tốt thường lớn hơn 1 Hz. Điều này có nghĩa là tín hiệu điện áp dao động giữa 0,1 V (hòa khí nhạt) và 0,9 V (hòa khí đậm) với tần số tối thiểu là một lần trong một giây.
Cảm biến điện trở nhảy
Thân gốm của cảm biến làm bằng titan dioxide, được phủ bằng những điện cực bằng platin xốp.
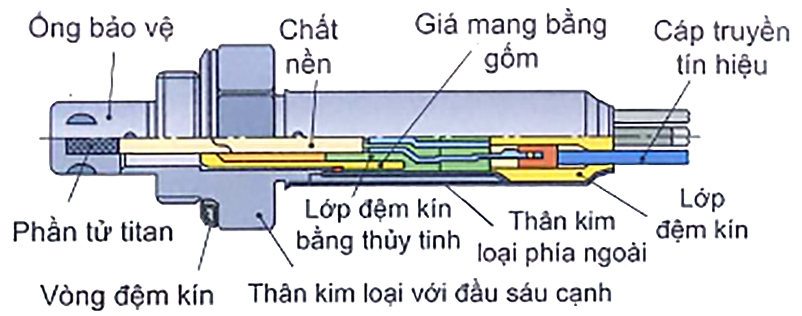
Nguyên lý hoạt động: Khả năng dẫn điện của titan dioxide thay đổi theo nồng độ oxy trong khí thải và nhiệt độ của thân gốm. Với hòa khí nhạt (λ > 1) titan dioxide dẫn điện kém hơn là với hòa khí đậm (λ < 1).
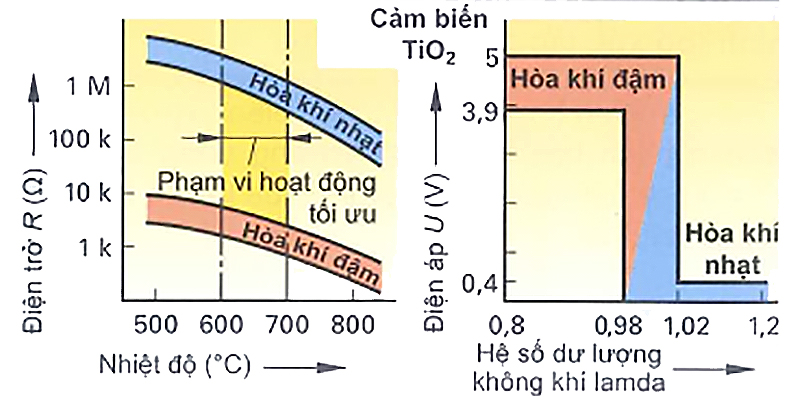
Khi λ = 1 thì điện trở của cảm biến titan dioxide thay đổi, dao động trong khoảng 1 kΩ (hòa khí đậm) và 1 MΩ (hòa khí nhạt).
Một điện trở đo được mắc nối tiếp với phần tử cảm biến trong bộ điều khiển. Dựa trên sự thay đổi điện trở của thân gốm titan dioxide theo nồng độ oxy trong khí thải, sự sụt điện áp ở điện trở đo thay đổi giữa 0,4 V (hòa khi nhạt) và 3,9 V đến 5 V (hòa khí đậm). Khác với đầu dò zirconi dioxide, trường hợp này không cần đến không khí chuẩn. Tần số điều chỉnh cho đầu dò hoạt động tốt lớn hơn 1 Hz. Nhiệt độ hoạt động tối ưu trong khoảng 600 °C đến 700°C. Để giữ được nhiệt độ này phải cần một bộ gia nhiệt cảm biến có điều chỉnh. Cảm biến bắt đầu hoạt động từ 200 °C mặc dù tần số điều chỉnh để hiệu chỉnh chính xác cho hòa khí còn rất thấp. Cảm biến có thể bị phá hủy ở nhiệt độ cao hơn 850 °C.
Cảm biến oxy băng rộng
Với cảm biến oxy băng rộng, các trị số λ > 0,7 có thể được đo liên tục. Vì thế nó thích hợp để điều chỉnh λ liên tục cho động cơ Otto vận hành với hòa khí nhạt, động cơ diesel và động cơ chạy bằng khí đốt.
Nhiệt độ hoạt động tối ưu của cảm biến này trong khoảng 700 °C đến 800 °C.
Cấu tạo: Cảm biến bao gồm 2 cảm biến điện áp nhảy bằng zirconi dioxide, cái thứ nhất được sử dụng làm khoang đo (khoang cảm biến), cái còn lại dùng làm khoang bơm. Cả hai khoang được sắp xếp để tạo một khe khuếch tán tối thiểu giữa chúng (10 μm đến 50 μm). Khe hở khuếch tán được dùng làm buồng đo và nối liền với khí thải bằng một cửa vào. Bên trong khoang đo có một kênh không khí chuẩn được nối liền với không khí bên ngoài.
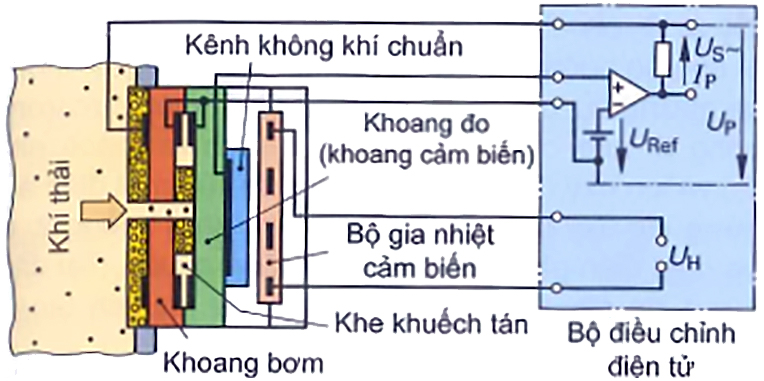
Nguyên lý hoạt động của khoang bơm: Khi chất điện phân rắn của cảm biến điện áp nhảy được cấp điện sẽ tạo ra sự chuyển động của những ion oxy (= dòng điện bơm) khi nhiệt độ cao hơn một giá trị nhất định. Chiều chuyển động của ion oxy phụ thuộc vào sự phân cực (+/-) của điện áp sử dụng.
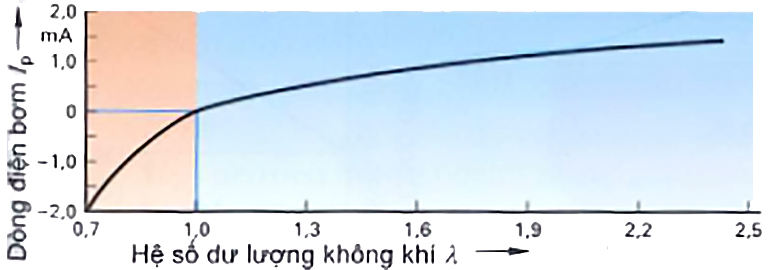
Tác dụng kết hợp của khoang đo – khoang bơm: Khoang đo (khoang cảm biến) vận hành theo nguyên tắc của cảm biến điện áp nhảy để xác định lượng oxy dư trong khí thải. Nếu hòa khí nhạt ( λ > 1 dẫn tới Uλ < 300 mV) thì bộ điều chỉnh điện tử tác dụng lên khoang bơm một điện áp (Uphía khí thải + ; Ungăn đo − ) sao cho những ion oxy di chuyển từ khe khuếch tán qua các chất điện phân rắn xốp hướng về phía khí thải (được bơm ra). Quá trình này được tiếp diễn cho đến khi đạt được giá trị λ = 1 trong khoang đo. Tại đây dòng điện bơm cần thiết tỷ lệ với nồng độ oxy dư trong khí thải (Hình dưới). Dòng điện bơm được dùng như đại lượng đo trị số hiện thời của lamda. Từ đó cho phép bộ điều khiển động cơ có thể tạo liên tục các hòa khí với tỷ lệ mong muốn tùy thuộc vào biểu đồ đặc trưng được lưu trữ.
Xem thêm:
- Hệ thống ống xả máy xăng (Phần 1: Thành phần khí thải)
- Hệ thống ống xả máy xăng (Phần 2: Biện pháp xử lý khí thải)
- Hệ thống ống xả máy xăng (Phần 3: Cảm biến Oxy)
- Hệ thống ống xả máy xăng (Phần 4: Xử lý NOx)
- Hệ thống ống xả máy xăng (Phần 5: Đăng kiểm tại Châu Âu)
- Hệ thống ống xả máy xăng (Phần 6: Chẩn đoán OBD)
- Chỉ dẫn cơ xưởng: Chẩn đoán OBD