Mục lục:
- Cấu tạo
- Nguyên lý hoạt động
- Các loại mô-tơ điện cảm ứng
- Ưu / Nhược điểm của mô-tơ điện đồng bộ so với mô-tơ điện không đồng bộ
- Cảm biến Rotor / cảm biến góc quay tuyệt đối (Resolver Sensor)
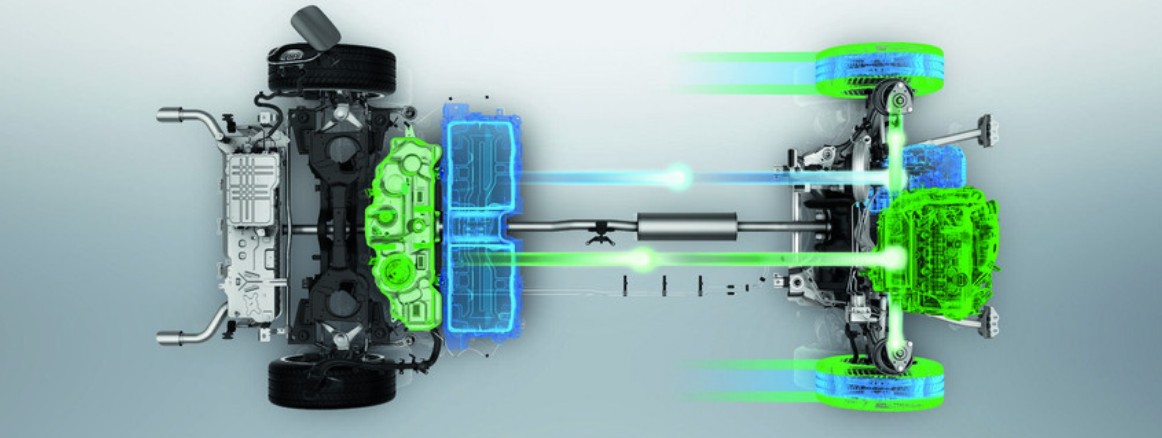
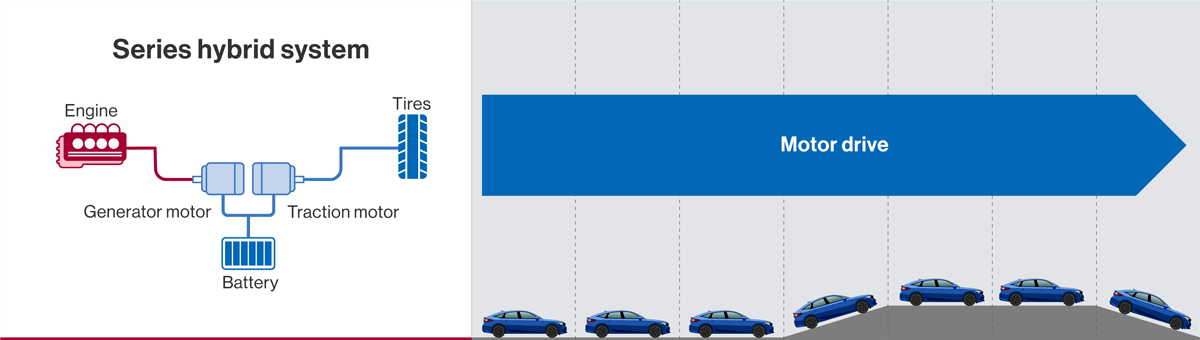
Mô-tơ điện cảm ứng (động cơ điện 3 pha) chủ yếu được lắp đặt trong xe cơ giới để hoạt động như động cơ điện và máy phát điện. Thiết bị này ở xe truyền động hybrid và xe vận hành bằng điện được gọi là động cơ-máy phát điện (Motor Generator – MG).
Cấu tạo
(Thí dụ trên truyền động hybrid, hình dưới)
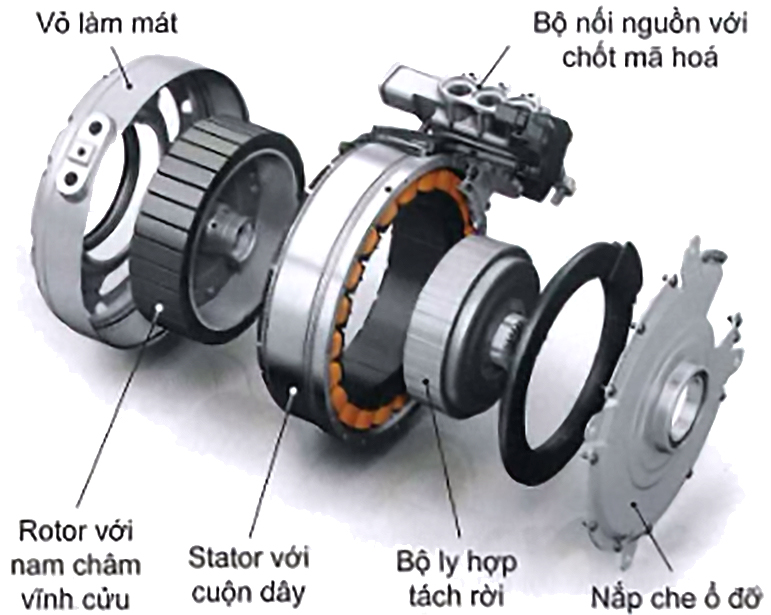
Motor điện cảm ứng để truyền động cho xe cơ giới gồm có:
- Một hộp vỏ có gắn cuộn dây stator (phần tĩnh)
- Một rotor (phần quay)
- Bộ nối nguồn
- Ổ đỡ chính
Ngoài ra, motor này còn có thể được lắp đặt thêm cảm biến vị trí rotor và nhiệt độ.
Các đặc điểm của mô-tơ điện cảm ứng so với động cơ đốt trong:
- Hiệu suất trung bình là khoảng 80 % đến 90 % (động cơ xăng khoảng 33 %, động cơ diesel 45 %)
- Phát huy lực tối đa ngay từ tình trạng đứng yên
- Phạm vi tốc độ quay có thể sử dụng được lớn hơn, cho phép sử dụng hộp số với ít cấp hơn
- Do ít ma sát hơn nên tạo ra ít nhiệt hơn
- Khi sử dụng làm máy phát điện, động năng có thể chuyển thành điện năng.
Nguyên lý hoạt động
Mô-tơ điện cảm ứng được vận hành với điện xoay chiều 3 pha (điện 3 pha).
Điện xoay chiều 3 pha (điện 3 pha): Khi vận hành mô-tơ điện cảm ứng như một động cơ, điện áp xoay chiều được đưa vào 3 dây dẫn riêng biệt, mỗi dây có chu kỳ riêng. Tiến trình theo thời gian so với điện áp trong 2 dây dẫn còn lại, lệch về phía trước hoặc sau 120°.
Khi kết nối 3 cuộn dây điện từ (U, V, W) với từng pha của điện 3 pha thì 1 từ trường sẽ được tạo ra trong mỗi cuộn dây. Tiến trình theo thời gian của các từ trường này cũng giống như tiến trình của điện áp, lệch với từ trường các cuộn dây khác 120°.
Nếu bố trí 3 cuộn dây trên một vòng tròn, thì từ các từ trường của từng cuộn dây riêng biệt tạo ra một từ trường tự quay.
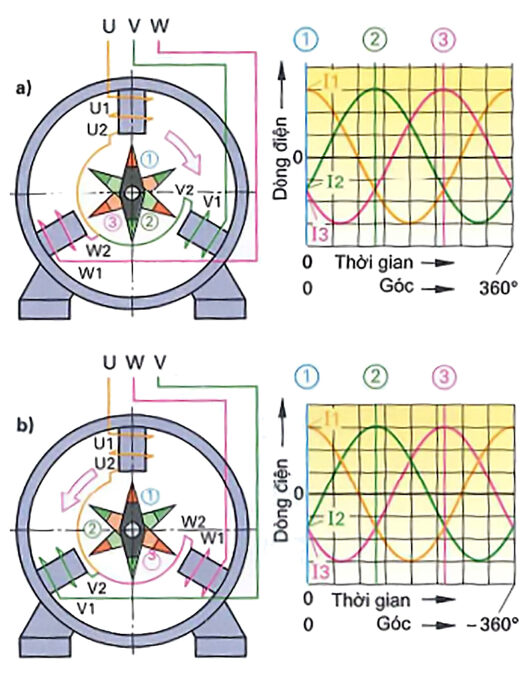
Chiều quay của từ trường tùy thuộc vào sự sắp xếp các cuộn dây stator:
Khi đặt một nam châm với ổ đỡ quay được (rotor) vào giữa từ trường, từ trường quay sẽ làm quay nam châm.
Vận tốc quay tùy thuộc vào tần số của điện xoay chiều ba pha, số cuộn dây của stator và số các cặp cực của rotor.
Thí dụ: Với tần số điện xoay chiều 50 Hz và ba cuộn dây, từ trường cũng sẽ quay 50 lần trong một giây (tương ứng với 3.000 lần mỗi phút).
Các loại mô-tơ điện cảm ứng
Người ta phân biệt máy điện cảm ứng không đồng bộ và đồng bộ. Chúng khác nhau chủ yếu trong cấu trúc của rotor.
Mô-tơ điện cảm ứng không đồng bộ
(Máy điện không đồng bộ /động cơ điện không đồng bộ)
Cấu tạo của rotor:
Bộ truyền động xe với động cơ điện không đồng bộ sử dụng chủ yếu một rotor kiểu lồng sóc. Rotor này bao gồm một lồng kim loại với các thanh dẫn và các vòng ngắn mạch được gắn trên trục phần quay.
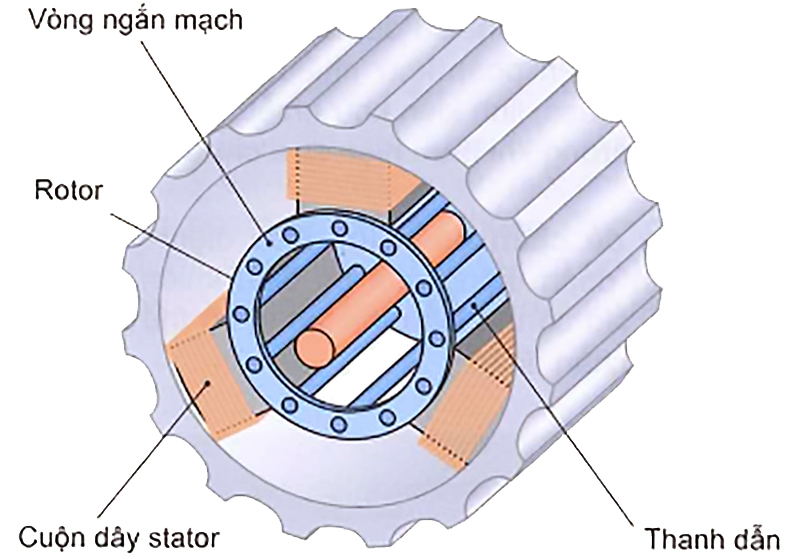
Nguyên lý hoạt động: Theo quan điểm về điện thì một mô-tơ điện không đồng bộ là một bộ biến áp. Cuộn dây stator tương ứng với cuộn dây sơ cấp còn cuộn dây rotor là các cuộn dây thứ cấp. Khi động cơ khởi động, từ trường quay do dòng điện xoay chiều tạo ra làm thay đổi từ thông trong các thanh dẫn của rotor. Điện áp được hình thành. Dòng điện chạy trên vòng ngắn mạch; từ đó dòng điện này lại tạo ra một từ trường xung quanh rotor. Từ trường này cùng với từ trường quay của stator tạo ra một mô-men quay làm quay rotor theo hướng từ trường quay.
Để tạo được một từ trường đủ mạnh ở rotor đang quay, từ trường quay phải quay với một tốc độ quay lớn hơn rotor, nghĩa là không đồng bộ. Vì vậy mô-tơ điện 3 pha này được gọi là mô-tơ điện không đồng bộ (động cơ điện không đồng bộ).
Sự khác biệt về tốc độ quay giữa từ trường quay và rotor được gọi là độ trượt. Mô-men xoắn của mô-tơ điện không đồng bộ phụ thuộc vào cường độ của dòng điện stator và độ trượt.
Độ trượt phải được tính đến khi điều khiển động cơ điện không đồng bộ. Để làm việc này, tần số của dòng điện xoay chiều 3 pha phải được tính toán cho phù hợp.
Mô-tơ điện cảm ứng đồng bộ
(Máy điện đồng bộ / động cơ điện đồng bộ)
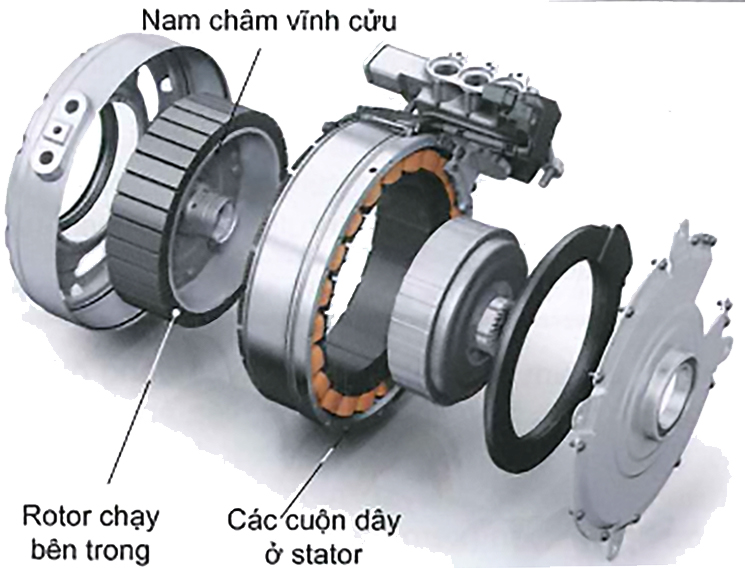
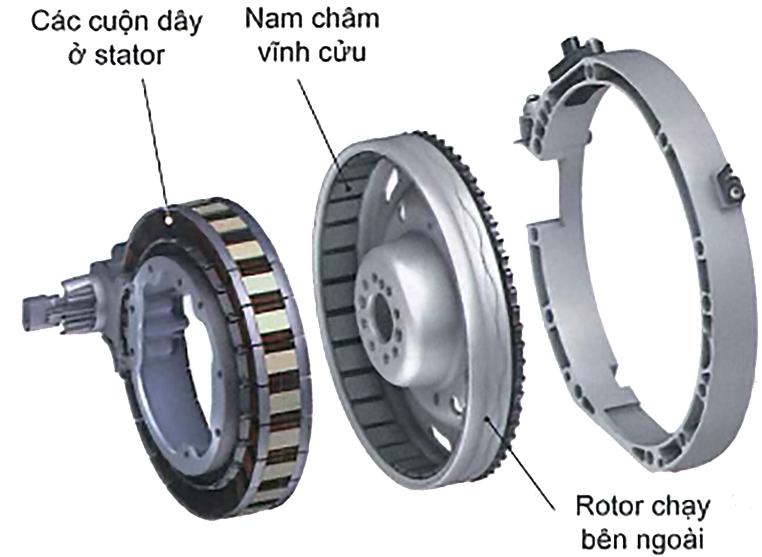
Cấu tạo của rotor: Hệ thống truyền động với động cơ điện đồng bộ thường được lắp đặt một rotor với nam châm vĩnh cửu. Người ta phân biệt hai kiểu thiết kế, rotor chạy bên trong và rotor chạy bên ngoài.
Rotor chạy bên trong: Để tạo ra từ trường cho rotor, nam châm vĩnh cửu được gắn bên ngoài rotor. Các cuộn dây ở stator bao bọc rotor.
Rotor chạy bên ngoài: Các cuộn dây ở stator nằm ở trong rotor. Nam châm vĩnh cửu được gắn cố định bên trong phần quay để tạo ra từ trường cho rotor.
Nguyên lý hoạt động: Các nam châm vĩnh cửu tạo ra từ trường xung quanh rotor. Khi một từ trường quay do dòng điện xoay chiều3 pha trong các cuộn dây stator tạo ra, thì các cực cùng tên (thí dụ như bắc-bắc) của rotor và của các cuộn dây stator đẩy nhau. Các cực khác tên (thí dụ, nam-bắc) sẽ hút nhau. Qua đó hình thành một mô-men xoắn, rotor tự quay và chạy theo từ trường quay.
Tốc độ quay của từ trường quay và rotor bằng nhau. Vì vậy, loại mô-tơ điện 3 pha này được gọi là mo-tơ điện đồng bộ (động cơ điện đồng bộ). Mô-men xoắn của mô-tơ điện đồng bộ nam châm vĩnh cửu tùy thuộc vào cường độ của dòng điện stator.
Ưu / Nhược điểm của mô-tơ điện đồng bộ với mô-tơ điện không đồng bộ
- Hiệu suất cao hơn
- Không có độ trượt: Tốc độ của stator phụ thuộc trực tiếp vào tần số của điện xoay chiều 3 pha.
- Ít phát nhiệt: Khi động cơ đứng yên, từ trường quay không tạo ra điện áp cao trong rotor như ở mô-tơ điện không đồng bộ. Không có dòng điện cao chạy qua gây quá nhiệt cho rotor.
- Sử dụng vật liệu quý hiếm: Để sản xuất nam châm cho mô-tơ điện đồng bộ được kích hoạt vĩnh cửu cần phải có đất hiếm (neodym và dysprosi).
Cảm biến Rotor / cảm biến góc quay tuyệt đối (Resolver Sensor)
Cảm biến vị trí Rotor đo vị trí chính xác của Rotors trên động cơ điện. Tín hiệu sẽ được gửi đến hộp điều khiển trong bộ Điện tử công suất (Power Electronic) từ đó hộp điều khiển sẽ tính toán ra số vòng tua và hướng quay của Rotor, tức của động cơ điện. Dựa trên thông tin của bàn đạp gas hoặc yêu cầu mô-men xoắn từ hệ thống hỗ trợ lái, bộ điện tử công suất (Power Electronic) sẽ điều khiển Mô-tơ điện tương ứng. Trên xe điện (EV), cảm biến vòng tua Rotor thường là loại cảm biến góc quy tuyệt đối (Resolver Sensor)
Cấu tạo của cảm biến góc quay tuyệt đối (Resolver Sensor) với vòng quay có vấu cam
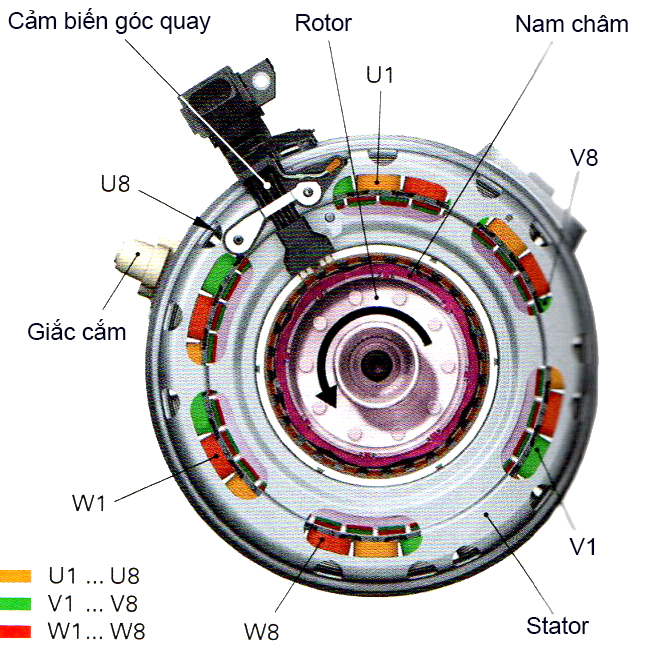
Resolver Sensor bao gồm nhiều cuộn dây sắp xếp theo hình vòng tròn. Trong đó có 1 cuộn dây kích từ (cuộn sơ cấp – Rotor): E và 2 cuộn dây thứ cấp (Stator): S1 – S2.
2 cuộn dây thứ cấp (Stator) có số lượng vòng dây quấn khác nhau. Các vòng dây trong cuộn dây được nối theo dạng nối tiếp với nhau (E/1 … E/28, S1/1 … S28, S2/1 … S2/28).
Chức năng của Resolver Sensor
Để khởi động Rotor của mô-tơ điện quay theo hướng mong muốn, cần phải biết được vị trí chính xác của nó so với nam châm vĩnh cửu trên Stator. Cảm biến góc quay tuyệt đối (Resolver Sensor) giúp xác định vị trí của Rotor khi đang đứng yên.
Resolver Sensor về căn bản là một máy biến thế nhỏ. Hộp điều khiển phóng một dòng điện xoay chiều có tần số cao tới cuộn dây kích từ (cuộn sơ cấp). Dòng điện này tạo ra từ trường biến đổi quanh cuộn dây.
Nhờ vào sự khác nhau giữa số vòng cuốn dây và thứ tự vị trí của các cuộn dây thứ cấp (S1 và S2) mà 2 cuộn dây này tạo ra hiệu điện thế khác nhau theo một góc (pha) 90 độ.
Độ tự cảm của 2 cuộn dây thứ cấp, cùng với đó là điện áp cảm ứng, phụ thuộc vào khoảng hở giữa các cuộn dây và trục sắt có vấu cam của Rotor. Nhờ vào những mấu cam này mà khi quay, trục Rotor tạo ra sự thay đổi về khoảng hở giữa trục và cuộn dây, kéo theo thay đổi về biên độ điện áp trong cuộn dây thứ cấp. Biên độ điện áp được ghi lại và tính toán bởi hộp điều khiển để cho ra vị trí của Rotor.
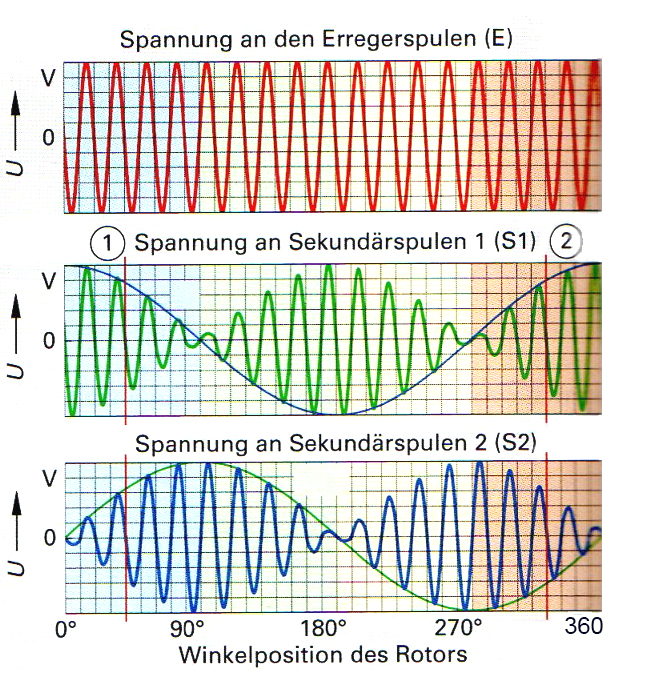
Ví dụ cụ thể (hình trên):
- Ở vị trí góc quay Rotor 45o, biên độ điện áp của cuộn dây S1 là +3,5V còn của cuộn dây S2 là +3V.
- Ở vị trí góc quay Rotor 135o, biện độ tương ứng của cuộn dây S1 là +3,5V còn của cuộn dây S2 là -3V.
Nhờ vào Resolver sensor mà vị trí của Rotor có thể được đo chính xác tới 0,5o
Cấu tạo của Cảm biến góc quay tuyệt đối với đường dẫn bằng đồng
Cấu tạo:
- 4 cuộn dây, mỗi cuộn lại bao gồm 1 cuộn dây thứ cấp và 2 cuộn sơ cấp
- Rotor bằng sắt với đường dẫn bằng đồng
- Bộ điều khiển cảm biến
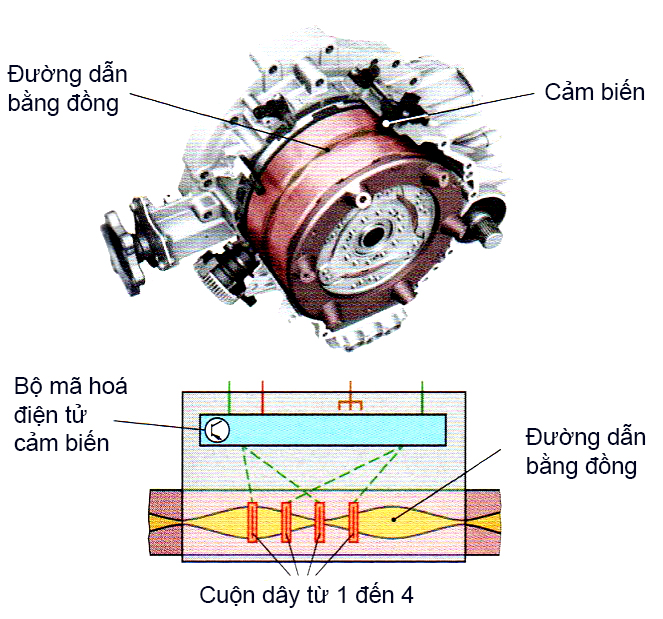
Chức năng:
Việc thay đổi từ trường diễn ra đường dẫn bằng đồng (không có từ trường) trên Rotor:
- Đường dẫn bằng đồng lớn: Từ trường nhỏ
- Đường dẫn bằng đồng nhở: Từ trường lớn
Tín hiệu được tính toán bởi bộ điều khiển cảm biến và cùng với vị trí của Rotor, truyền thông tin tới hộp điều khiển.
Xem thêm:
- 1.1 – Xe Hybrid (Phần 1: Tổng quan)
- 2.1 – Xe Điện – EV
- 3.1 – Động cơ – Máy phát điện (Motor Generator MG)
- 4.1 – Pin cao áp (HV Battery)
- 5.1 – Hệ thống giắc cắm xạc
- 6.1 – Bộ Điện tử công suất (Power Electronic)
- 7.1 – Cách điện và cân bằng điện áp trên xe điện áp cao
- Chỉ dẫn cơ xưởng: An toàn đối với xe điện áp cao